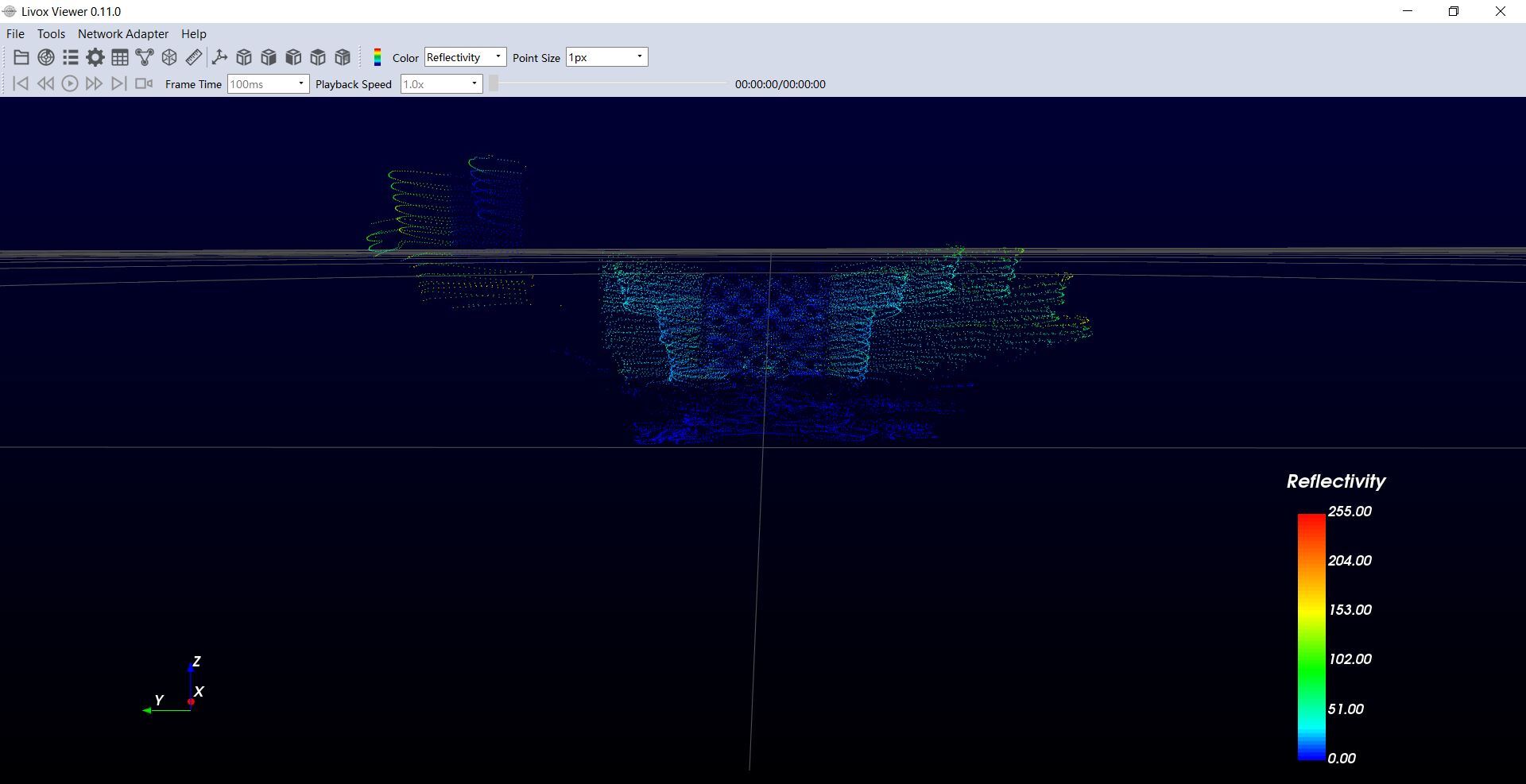


The above pictures show our recent updates with LiDAR. LiDAR is used to generate a 3D representation of objects in the form of a Point Cloud. We get the point cloud to get a 3D representation of whatever the LiDAR is capturing. Using this LiDAR data and the photographs captured by the cameras we get a clear idea on how far the obstacle is. We are currently working on fusion of both camera and LiDAR to improve the decsion making capability of the vehicle. We achieved Proportional, Integral, Derrivative(PID) for speed and we are working to make it accurate, also we are working on PID for steer control. We work on localization, i.e., it is the capability of an autonomus vehicle to pinpoint the location of the vehicle on the map, this helps the car to understandit's surroundings and act accordingly. Path Planning is also something we are working on where we use the road lines to determine the path of the vehicle.